- parallax mapping, offset mapping, photonic mapping, virtual displace mapping 이라고 부른다.
- 높이 정보를 활용하여 텍스처 좌표를 보정.
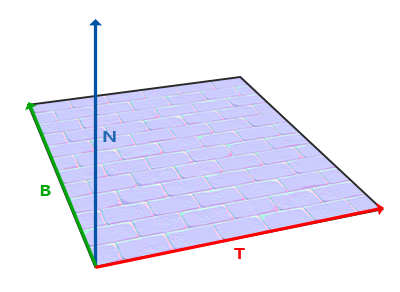
- Tangent Space 의 임의의 벡터 x는
(t, b, n)의 값을 갖게된다.
- t는 UV.u와 관련있을 것이고, b는 UV.v와 관련이 있게 된다.
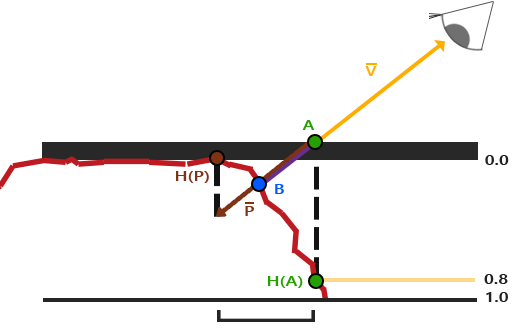
Eye
= -V_TS.tbn / V_TS.n
= -(V_TS.t / V_TS.n, V_TS.b / V_TS.n, V_TS.n / V_TS.n)
= -(V_TS.t / V_TS.n, V_TS.b / V_TS.n, 1)
half3x3 TBN = half3x3(normalInputs.tangentWS, normalInputs.bitangentWS, normalInputs.normalWS);
// 시점에 대한 tangent space의 V
OUT.V_TS = mul(TBN, GetCameraPositionWS() - vertexInputs.positionWS);
// 광원 계산을 위한 tangent space의 L
OUT.L_TS = mul(TBN, mainLight.direction);
// OUT.V_TS.t = dot(V, T);
// OUT.V_TS.b = dot(V, B);
// OUT.V_TS.n = dot(V, N);
// OUT.L_TS.t = dot(L, T);
// OUT.L_TS.b = dot(L, B);
// OUT.L_TS.n = dot(L, N);
half2 ParallaxMapping(half2 uv, half3 V_TS)
{
// 높이 맵에서 높이를 구하고,
half height = SAMPLE_TEXTURE2D(_NormalDepthPackedTex, sampler_NormalDepthPackedTex, uv).b;
// 시선에 대한 offset을 구한다.
// 시선은 반대방향임으로 부호는 마이너스(-) 붙여준다.
// TS.xyz == TS.tbn
half2 E = -(V_TS.xy / V_TS.z);
// 근사값이기에 적절한 strength를 곱해주자.
return uv + E * (height * _HeightStrength);
}
half3 L_TS = normalize(IN.L_TS);
half3 V_TS = normalize(IN.V_TS);
half2 parallaxUV = ParallaxMapping(IN.uv, V_TS);
if ((parallaxUV.x < 0.0 || 1.0 < parallaxUV.x) || (parallaxUV.y < 0.0 || 1.0 < parallaxUV.y))
{
// x, y가 범위([0, 1])를 벗어나면 discard.
discard;
}
// 계산 절약을 위해 `tangent space`기준으로 반사 계산을 한다.
half3 N_TS = UnpackNormal(SAMPLE_TEXTURE2D(_NormalDepthPackedTex, sampler_NormalDepthPackedTex, parallaxUV));
half NdotL = saturate(dot(N_TS, L_TS));
// `world space` 기준이라면 계산이 더 들어가게 된다.
half3 N_TS = UnpackNormal(SAMPLE_TEXTURE2D(_NormalDepthPackedTex, sampler_NormalDepthPackedTex, parallaxUV));
half3 N = mul(normalTex, TBN);
half3 L = mul(L_TS, TBN);
half NdotL = saturate(dot(N, L));
- 유니티에도 헬퍼 함수들이 있지만, 별로 추천안함…
- Parallax Mapping
- Parallax Mapping with offset limit
- Steep Parallax Mapping
- ReliefParallax
- Parallax Occlusion Mapping (POM)
- ….